Jun
14
2026
Power Hardware
Speaker finally working
After two evenings of debugging I discovered the amplifier wasn't faulty — the I2S configuration was off. Audio is finally working.
Open Source Build
An autonomous, R2-D2 style companion robot, built entirely in Go.
Currently Working On
Dome Rotation System
func main() {
gen := sound.NewGenerator(output.NewNativeOutput())
var engine *personality.Engine
engine = personality.NewEngine(func(name string) {
fmt.Printf("[%s] %s
", engine.State.CurrentMood(), name)
gen.Play(name)
})
engine.OnMoodChange(func(from, to personality.Mood) {
fmt.Printf("[mood] %s → %s
", from, to)
})
engine.SetMood(personality.Excited)
ctx, cancel := signal.NotifyContext(context.Background(), os.Interrupt, syscall.SIGTERM)
defer cancel()
fmt.Println("R2-D2 online. Ctrl+C to shut down.")
engine.Run(ctx)
fmt.Println("R2-D2 offline.")
}Written in Go for concurrency, reliability and performance. It orchestrates sensors, actuators and the behaviours across the entire system.
Browse source on GitHub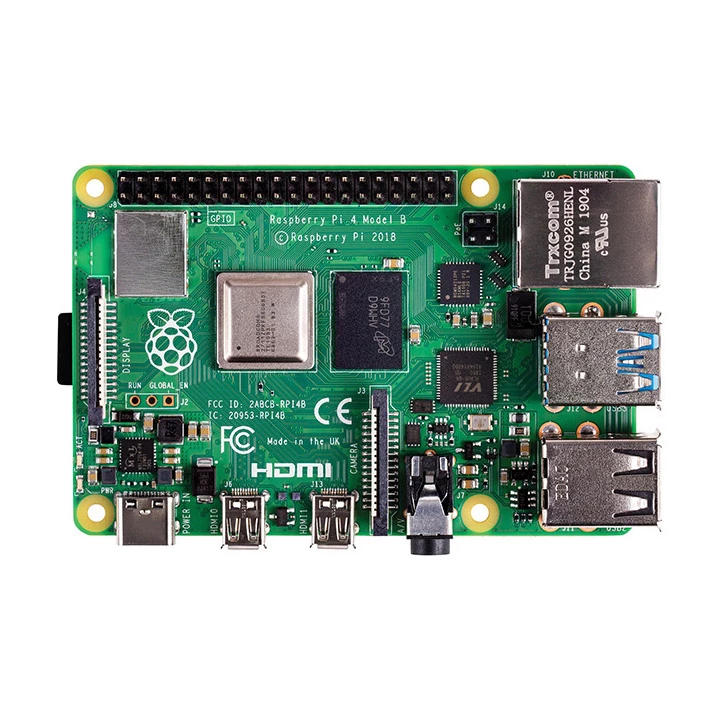
Raspberry Pi 4
Main Computer
Working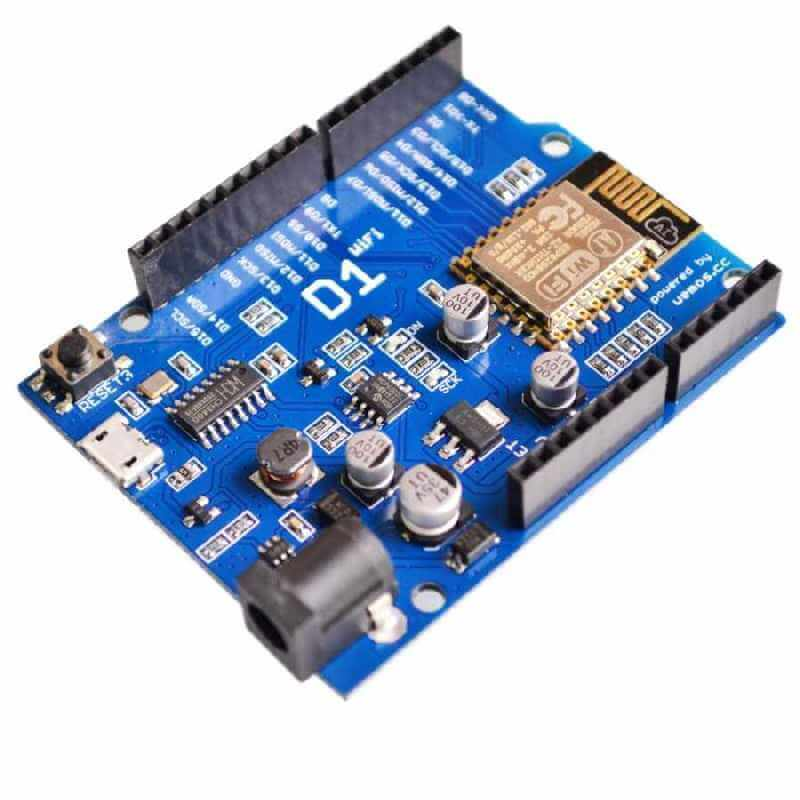
Wemos D1 Mini
Peripheral MCU
Working
MG996R Servo
Dome Rotation
Working
TDA2030A + JBL Speaker
Audio Output
Working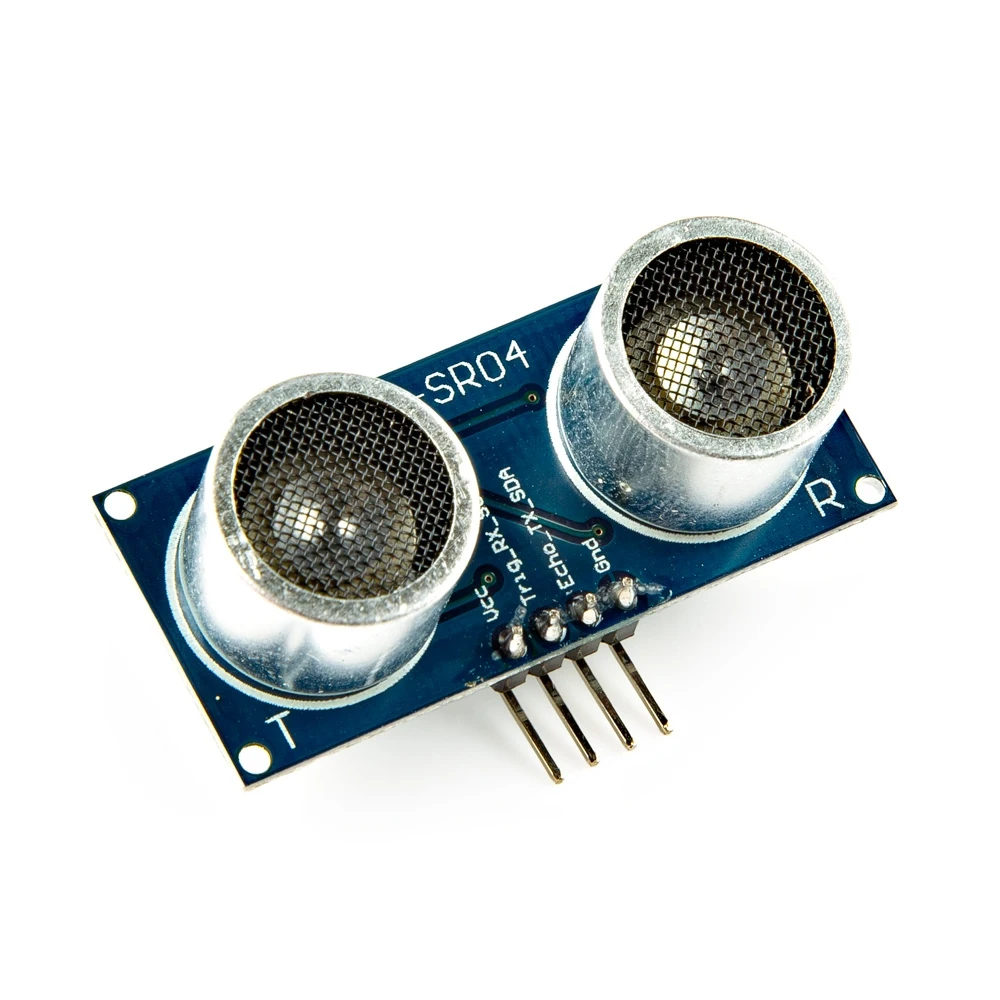
HC-SR04
Ultrasonic Range
Planned
Ender 3 v3 KE
3D Printer
WorkingAfter two evenings of debugging I discovered the amplifier wasn't faulty — the I2S configuration was off. Audio is finally working.
Another buck converter failed due to an incorrect load. Learned my lesson — properly rated this time.